3 Robot
로봇 연결, 설정 및 조작 방법을 안내합니다.
🤖 지원 로봇
Agile X Piper
레인보우로보틱스 RB시리즈
➕ 로봇 추가하기
-
1. 로봇 추가
로봇 페이지에서 "+" 버튼을 클릭합니다.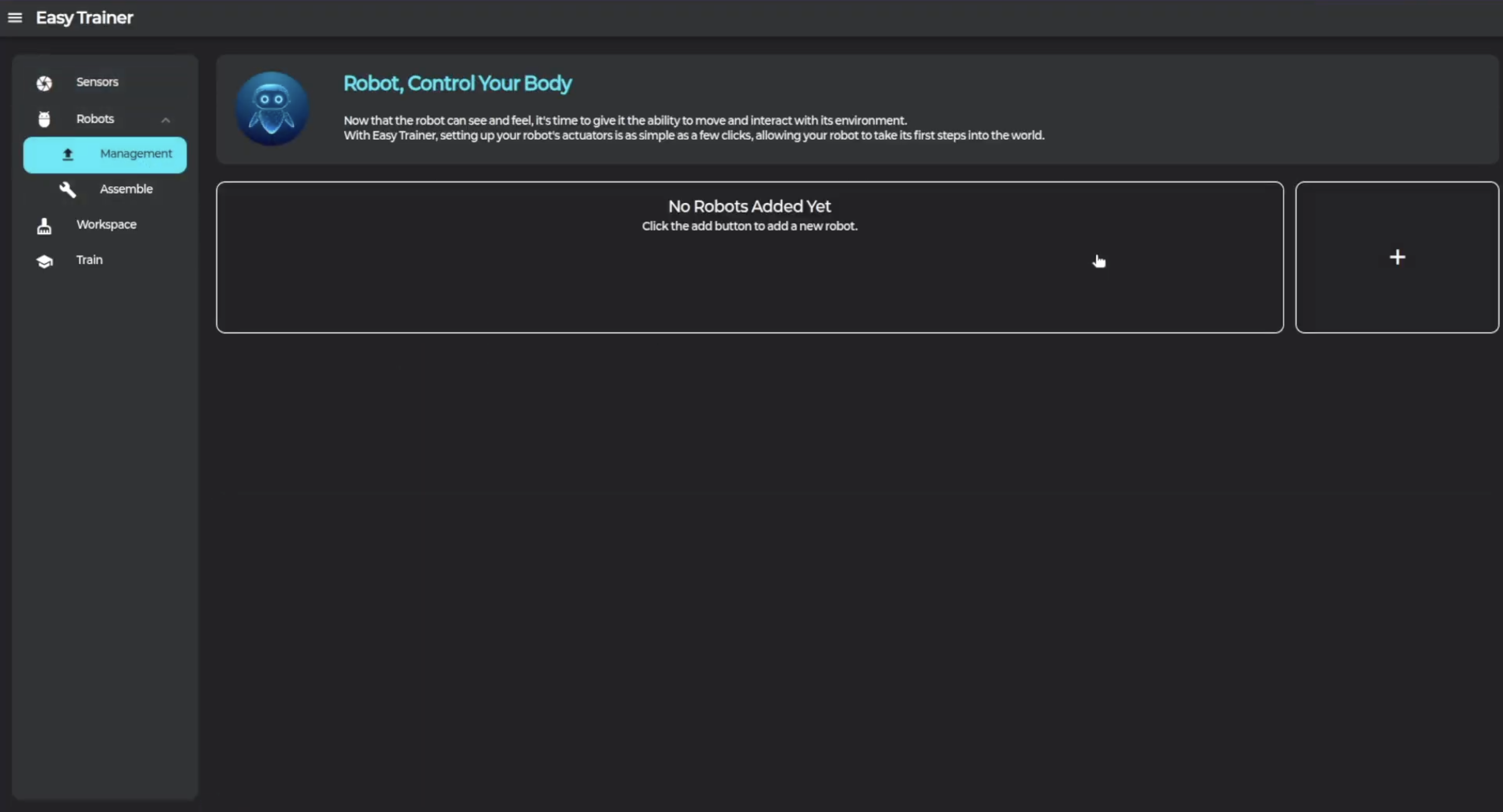
-
2-1. 지원 로봇 설정
앱에서 지원하는 로봇일 경우, 로봇 이름, 로봇 종류, 통신 포트를 입력합니다.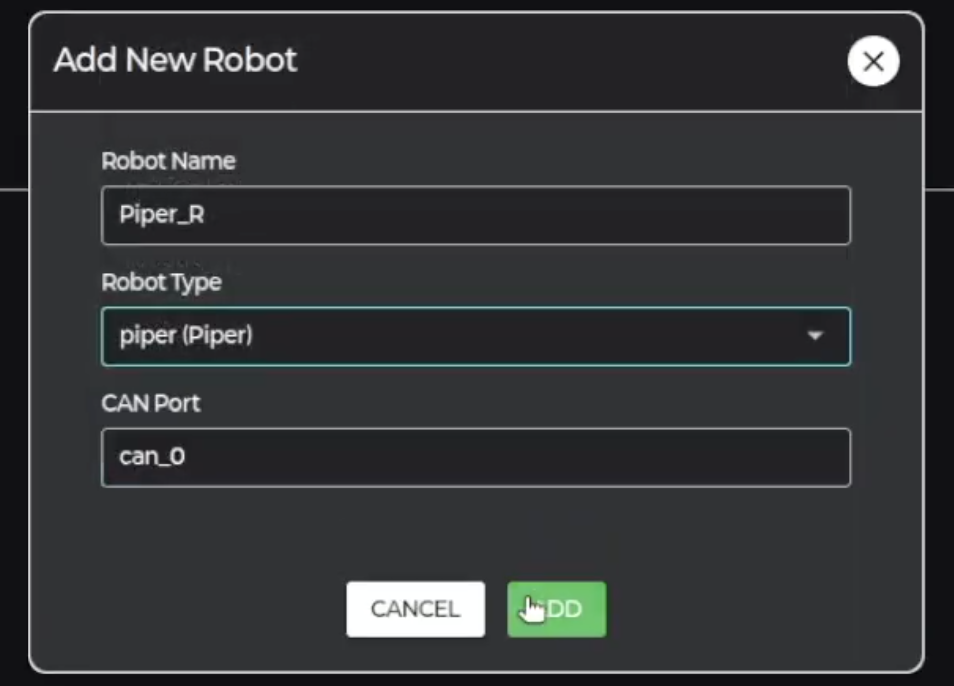
-
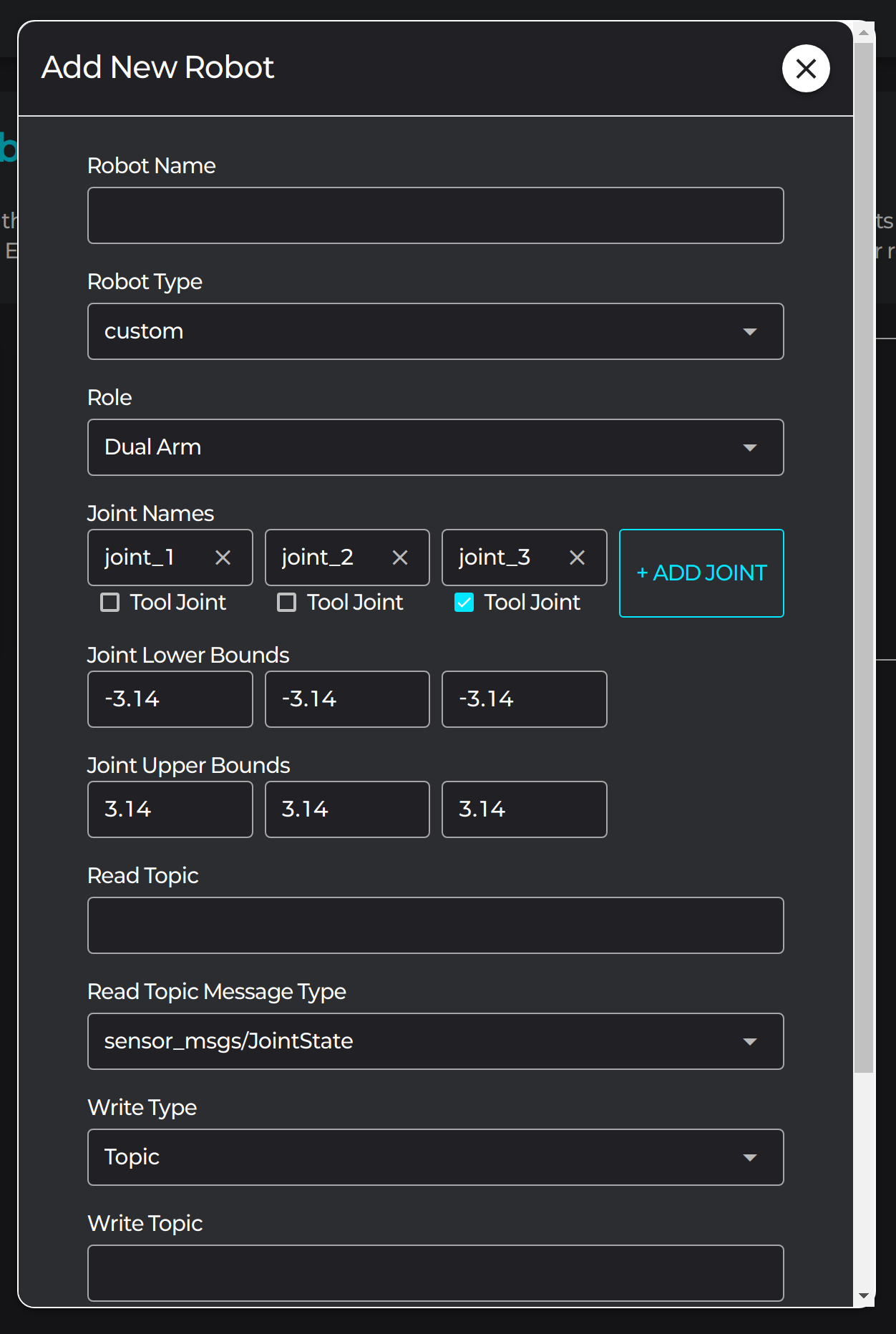
2-2. 비지원 로봇 설정
앱에서 지원하지 않는 로봇일 경우, robot type에 custom 선택 후 ROS2 요소들을 직접 입력합니다.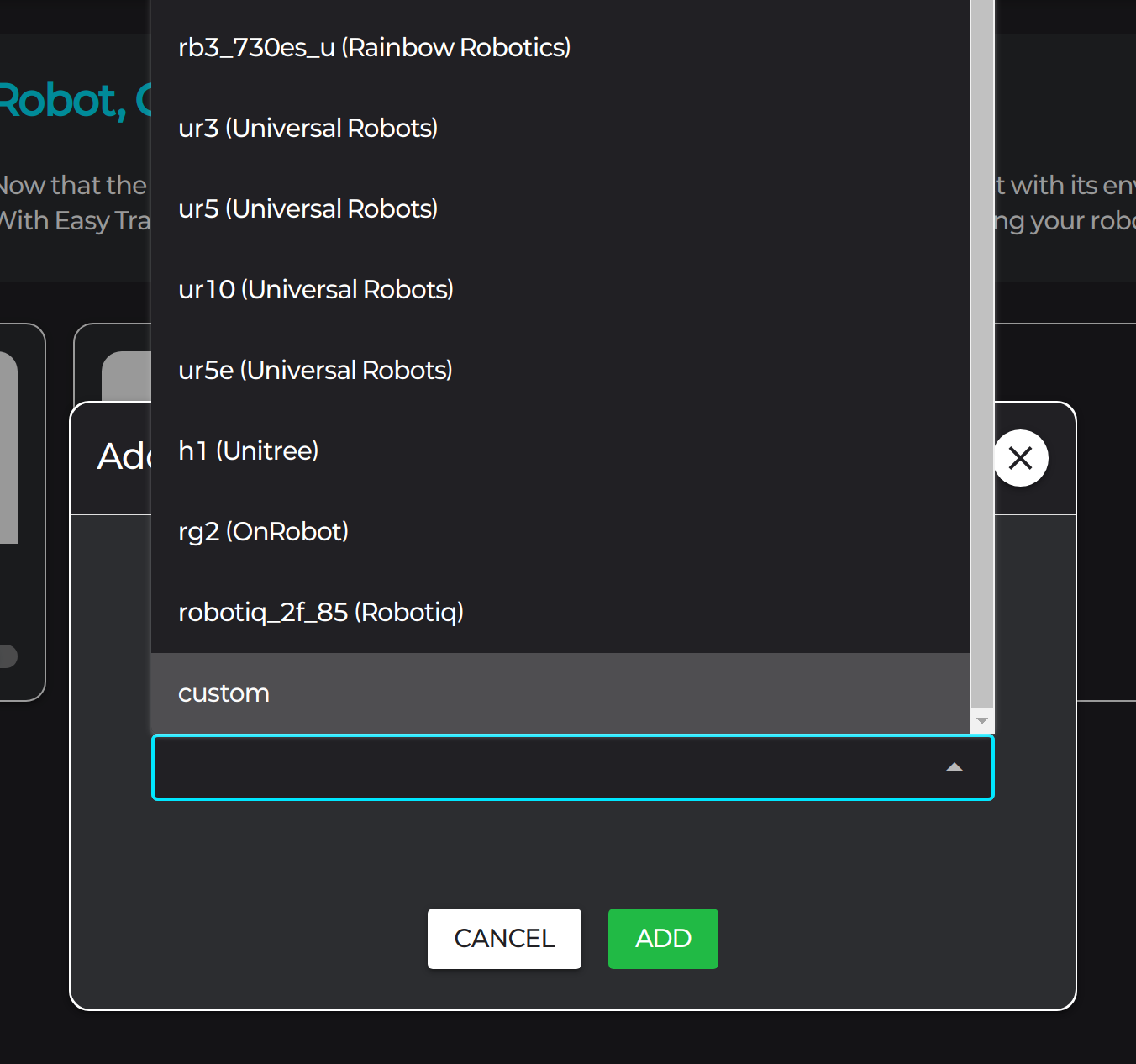
-
3. 로봇 확인
추가된 로봇의 버튼을 클릭하여 Joint 값이 정상적으로 표시되는지 확인합니다.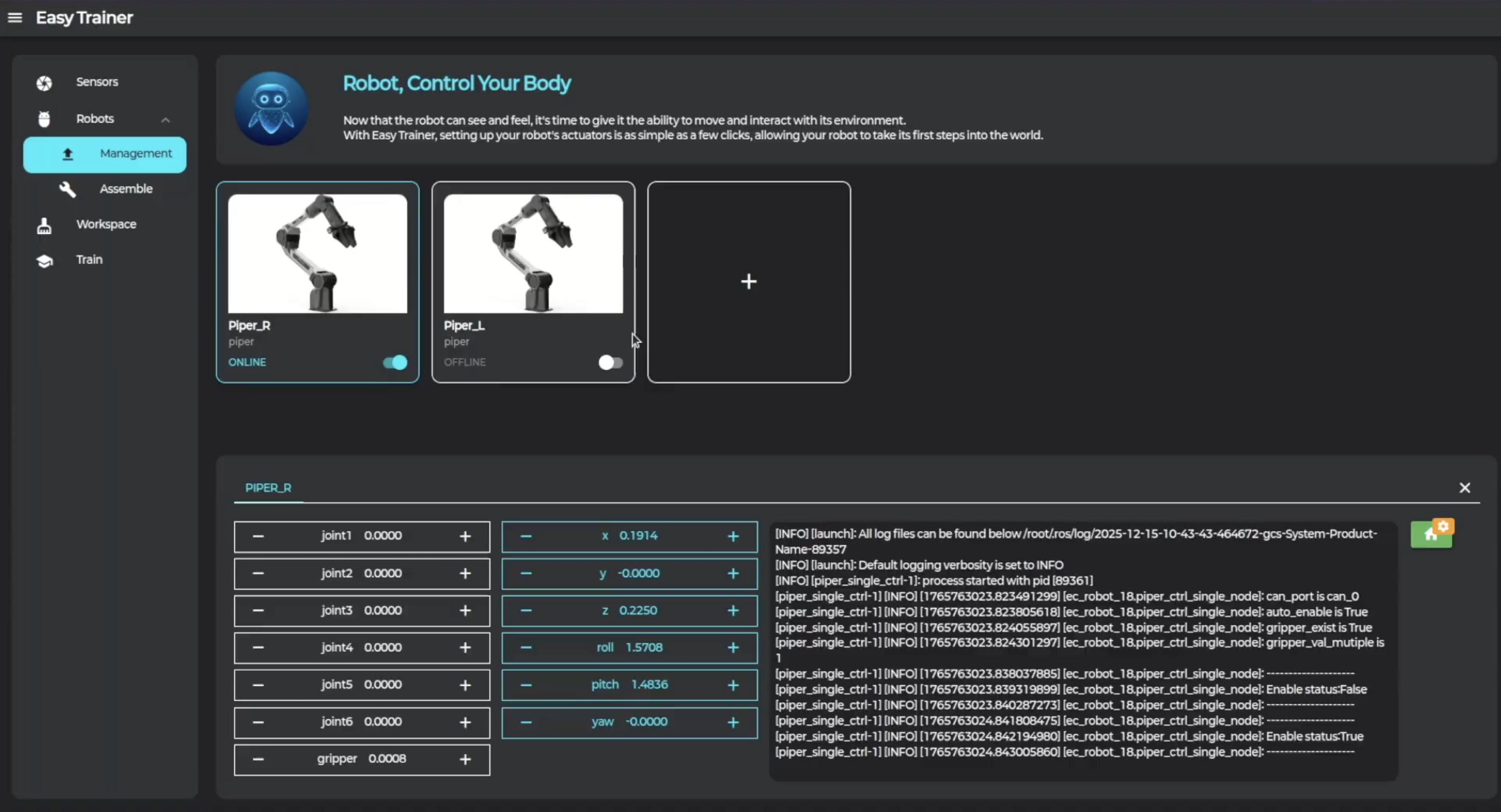
🎮 간단한 로봇 조작
Joint Space 조작 / Task Space 조작
아래 창에서 "+", "-" 버튼을 통해 간단하게 로봇을 조작할 수 있습니다.
홈 포즈 설정
-
1. 우측 하단의 주황색 설정 모양 버튼을 클릭합니다.
-
2. 원하는 홈 포즈를 입력한 후 저장합니다.
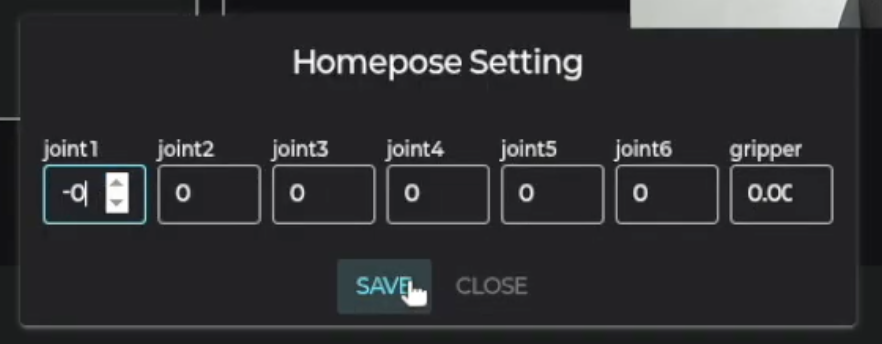
-
3. 이후 초록색 홈 버튼 클릭 시, 로봇이 저장한 포즈로 이동합니다.
로봇 조작 전에 반드시 안전한 작업 공간을 확보하세요.