4 Robot Assembly
로봇 어셈블리 구성 및 역할 설정 방법을 안내합니다.
🔧 로봇 어셈블리란?
어셈블리 개념
대부분의 로봇은 매니퓰레이터 + 외부 그리퍼 형태로 동작합니다.
또한 어떤 작업은 여러 대의 로봇을 필요로 합니다.
따라서 Easy-Trainer는 여러 로봇을 하나의 어셈블리로 묶어서 관리할 수 있는 기능을 제공합니다.
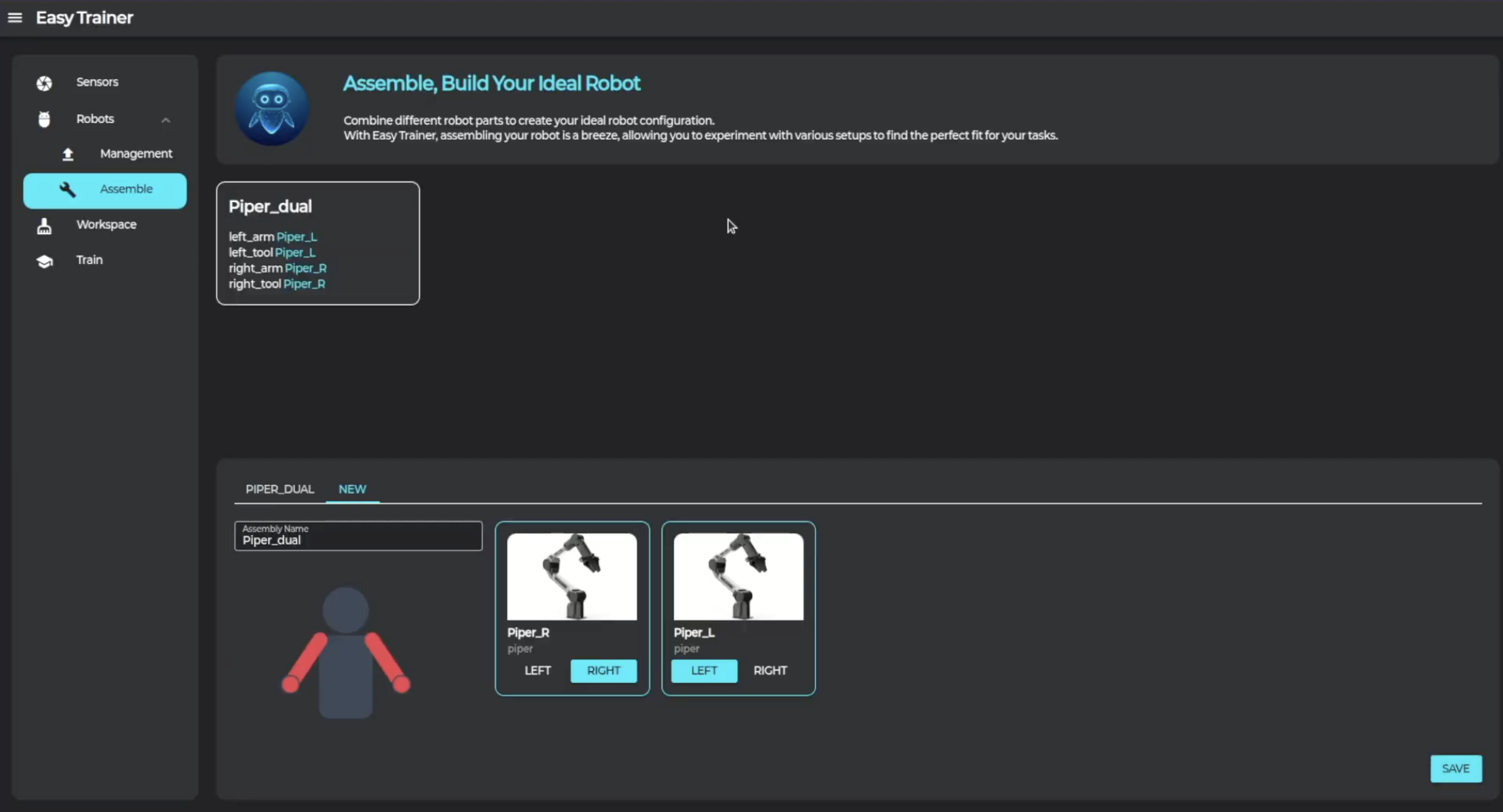
👥 역할 설정
로봇을 클릭하면, 좌측 사람 모형이 로봇의 역할에 맞게 자동으로 업데이트됩니다.
각 로봇에 왼팔, 오른팔, 몸통 등의 역할을 할당하여 협업 작업을 구성할 수 있습니다.
💡 유용한 팁
복잡한 작업일수록 어셈블리 구성을 명확하게 설정하는 것이 중요합니다.